Différence entre la planification préventive et non préemptive dans le système d'exploitation
Différence clé - préemptif vs planification non préemptionnelle dans le système d'exploitation
Un processus est un programme en exécution. Un ordinateur devrait effectuer de nombreuses tâches en même temps. Par conséquent, le CPU devrait obtenir des processus et les exécuter. Parfois, il est nécessaire d'exécuter certains processus que les autres processus. À ce stade, le processus de course est interrompu et le CPU est alloué au nouveau processus. Une fois la tâche terminée, le CPU est alloué au processus précédent. La planification selon ce mécanisme est connue sous le nom de planification préemptive. Si le processus en cours d'exécution ne peut pas être interrompu et il est obligatoire d'exécuter le processus en cours, alors il est connu sous le nom de planification non préventive. Cet article traite de la différence entre la planification préventive et non préemptive dans un système d'exploitation. La planification préemptive est le mécanisme de planification de processus à travers lequel un processus qui peut être interrompu par un autre processus au milieu de son exécution. La planification non préemptive est le mécanisme de planification du processus à travers lequel un processus démarre l'exécution uniquement après la fin du processus précédent. C'est le différence clé entre Planification préventive et non préemptive dans le système d'exploitation.
CONTENU
1. Aperçu et différence clé
2. Qu'est-ce que la planification préemptive dans le système d'exploitation
3. Qu'est-ce que la planification non préemptive dans le système d'exploitation
4. Similitudes entre la planification préventive et non préemptive dans le système d'exploitation
5. Comparaison côte à côte - planification préemptive vs non préemptive dans le système d'exploitation sous forme tabulaire
6. Résumé
Qu'est-ce que la planification préemptive dans le système d'exploitation?
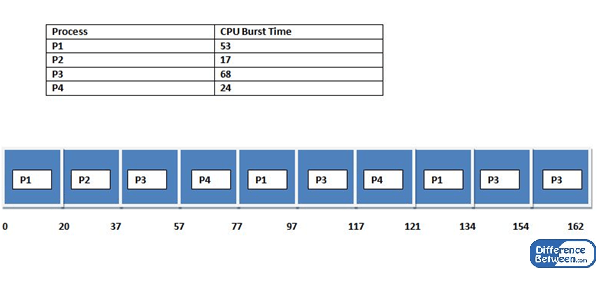
La planification de la ronde est un exemple de planification préemptive. Chaque processus obtient une petite quantité de temps de processeur. Il est généralement de 10 à 100 millisecondes. Cette petite unité de données est également connue sous le nom de Time Quantum. Une fois que ce temps s'est écoulé, le processus est préempté et ajouté à la fin de la file d'attente prête. Supposons qu'il existe 4 processus comme P1, P2, P3 et P4. Les heures d'éclatement du processeur en millisecondes sont les suivantes. Le temps quantum est 20.
Figure 01: Exemple de planification de la ronde
Le processus P1 s'exécute jusqu'à 20. Il reste 33 ms autres. Ensuite, le P2 s'exécute. Comme le temps du temps est de 20 et le temps requis P2 est de 17 ms, P2 s'exécutera pendant 17 ms. Ainsi, le processus P2 est terminé. Ensuite, la chance est donnée à P3. Il s'exécutera pendant 20 ms. Le reste est de 48 ms. Ensuite, le P4 s'exécutera pendant 20 ms. Il a 4 ms pour terminer le processus total. Encore une fois, le P1 s'exécutera pendant 20 ms. Il a encore 13 ms pour terminer le processus. Le changement est donné à P3. Il s'exécutera pendant 20 ms, et il a encore 28 ms pour terminer complètement. Le P4 s'exécute. Il n'a que 4 ms. Par conséquent, P4 termine l'exécution. P2 et P4 ont déjà terminé. Les processus restants sont P1 et P3. La chance est donnée à P3. Il avait 13 ms à terminer, donc il termine. Maintenant, le seul processus restant est P3. Il a 28 ms à compléter. Donc P3 fonctionnera sur 20 ms. Le reste est 8 ms. Tous les autres processus ont déjà terminé l'exécution. Par conséquent, encore une fois, le reste de 8 ms de P3 exécutera. De même, chaque processus a une chance d'exécuter.
Qu'est-ce que la planification non préemptive dans le système d'exploitation?
Le premier arrivé, la planification du premier servi (FCFS) peut être considérée comme un exemple de planification non préemptionnelle. Le processus qui demande d'abord est alloué au CPU d'abord. Cette planification est facilement gérée par la première file d'attente de première sortie (FIFO). S'il y a des processus sont venus en ordre P1, P2 et P3, alors la chance est d'abord donnée à P1. Une fois sa fin terminée, P2 exécutera. Une fois P2 terminer, le P3 exécutera. Supposons qu'il existe 3 processus en tant que P1, P2 et P3 avec les temps d'éclatement du CPU en millisecondes comme suit.
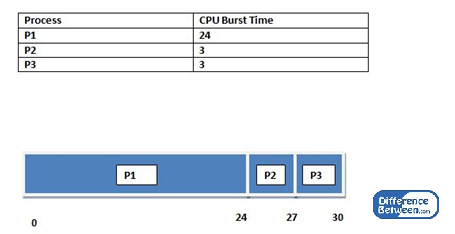
Figure 02: Exemple de planification FCFS
Selon ce qui précède, P1 exécutera. Une fois qu'il est terminé, le processus P2 est exécuté pendant 3 ms. Maintenant, le processus restant est P3. Ensuite, il exécutera. Le temps d'attente pour P1 est zéro. Le processus P2 a dû attendre 24 ms, et le processus P3 a dû attendre 27 ms. Si les processus sont arrivés dans l'ordre P2, P3 et P1, alors P2 se terminera d'abord. Le prochain P3 se terminera, et enfin, P1 se terminera.
Quelle est la similitude entre la planification préventive et non préventive dans le système d'exploitation?
- La planification préemptive et non préemptive dans le système d'exploitation est des mécanismes pour planifier les processus dans un ordinateur.
Quelle est la différence entre la planification préventive et non préemptive dans le système d'exploitation?
Planification préemptive vs non prorde dans le système d'exploitation | |
| La planification préventive est le mécanisme de planification du processus à travers lequel un processus peut être interrompu par un autre processus au milieu de son exécution. | La planification non préemptive est le mécanisme de planification du processus à travers lequel un processus démarre l'exécution uniquement après la fin du processus précédent. |
| Interruption de traitement | |
| Dans la planification préventive, les processus peuvent être interrompus. | Dans la planification non préemptionnelle, les processus peuvent être interrompus. |
| Utilisation du processeur | |
| Dans la planification préventive, l'utilisation du processeur est plus élevée que la planification non préemptionnelle. | Dans la planification non préemptive, l'utilisation du processeur est minimale par rapport à la planification préventive. |
| La flexibilité | |
| La planification préventive est flexible. | La planification non préemptive n'est pas flexible. |
Résumé - préemptif vs planification non préemptionnelle dans le système d'exploitation
Il y a plusieurs processus exécutés sur un ordinateur. Lorsque chaque processus s'exécute, le CPU est alloué à ce processus spécifique. Parfois, il est nécessaire d'arrêter l'exécution du processus actuel et de donner la priorité à un autre processus. Les mécanismes de planification des processus peuvent être préventifs ou non préemptionnels. La planification préemptive est le mécanisme de planification de processus à travers lequel le processus peut être interrompu par un autre processus au milieu de son exécution. La planification non préemptive est le mécanisme de planification du processus cependant quel processus démarre l'exécution uniquement après la fin du processus précédent. C'est la différence entre la planification préventive et non préemptive dans le système d'exploitation.
Téléchargez le PDF de la planification préemptive et non préemptive dans le système d'exploitation
Vous pouvez télécharger la version PDF de cet article et l'utiliser à des fins hors ligne selon la note de citation. Veuillez télécharger la version PDF ici: différence entre la planification préemptive et non préemptive dans le système d'exploitation
Référence:
1.Qu'est-ce que la planification préventive et non préemptive?. Disponible ici
2.Point, tutoriels. «Algorithmes de planification du système d'exploitation.», Point de tutoriels. 8 janvier. 2018. Disponible ici
3.«Quels sont les termes préventifs et non préemptifs dans le contexte de la SG ?”Q&R Geeksforgeeks. Disponible ici


